
Наука сегодня, как и в всегда, идет навстречу медицине. Мечты фантастов и режиссеров Голливуда о том, что роботизированные протезы смогут полноценно заменить потерянные части человеческого тела, постепенно становятся реальностью. Не отстают от своих западных коллег и российские изобретатели, в том числе донские.
Как созданная в ростовском вузе роботизированная система поможет инвалидам-опорникам быстрее реабилитироваться и жить полной жизнью «Деловой газете.Юг» рассказал к.т.н., доцент, зав. кафедрой «Робототехника и мехатроника» ФГБОУ ВО «ДГТУ» Андрей Изюмов.
Протезы и роботизированные системы для ног
В середине декабря прошлого года стало известно, что объединение «Металлист» Госкорпорации Ростех, используя уникальный сплав РС-553, разработало бионический коленный модуль «Комета» со встроенным микропроцессором для протезирования нижних конечностей, способный работать от одной зарядки 10 дней подряд.
Встроенный в протез микропроцессор осуществляет сбор и обработку данных в режиме реального времени со скоростью более тысячи раз в секунду, а нейросеть предсказывает ритм и рисунок ходьбы, что позволяет использовать протез при ходьбе и беге. Ожидается, что в серийное производство модуль будет запущен в первом квартале 2024 года.

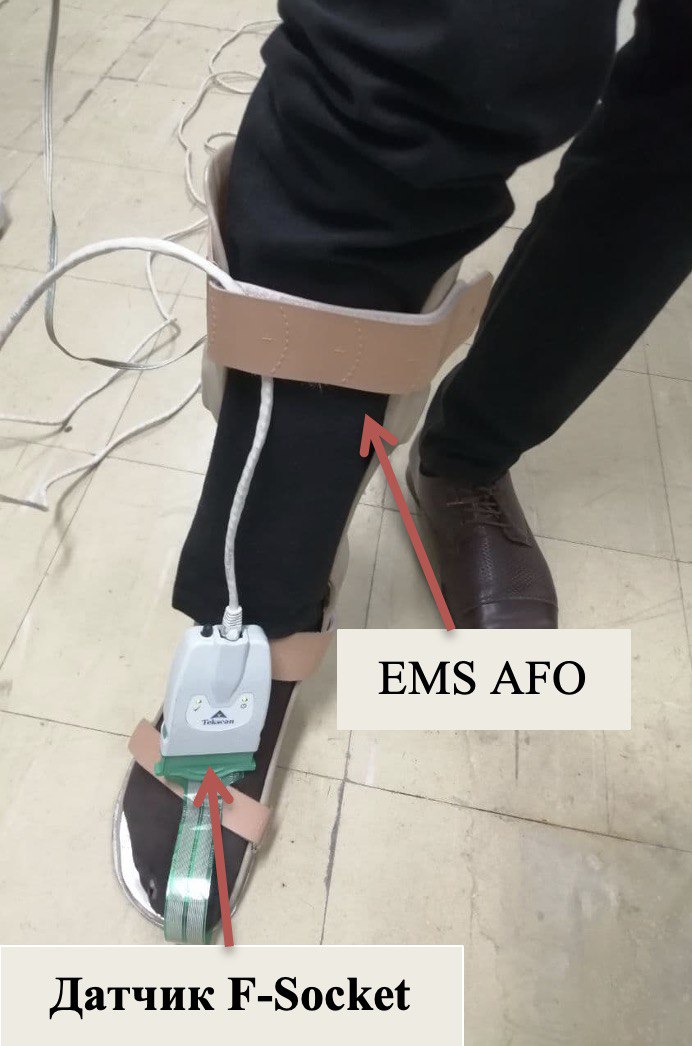
Ростовские ученые также ведут разработки в сфере так называемой «носимой роботехники». Так, к.т.н., доцент, зав. кафедрой «Робототехника и мехатроника» ФГБОУ ВО «ДГТУ» Андрей Изюмов и его аспирант, специалист Министерства образования Ирака Хуссейн Талиб Саббах Хуссейн создали электромеханическую систему снижения нагрузок в голеностопном суставе ортеза.
«Наша научная работа носит международный характер и представляет непосредственный интерес для взаимодействия между РФ и Ираком. По материалам научно-исследовательской работы опубликовано одиннадцать научных статей, получено два патента РФ на изобретение», — рассказывает Андрей Изюмов.
Носимая робототехника
Разработанный специалистами донского вуза роботизированный привод экзоскелета позволяет повысить эффективность реабилитации пациентов с повреждениями голеностопного сустава, дозируя нагрузку и контролируя угол сгибания/разгибания сустава и напряжений, действующих в процессе лечебной гимнастики и ходьбы.
«Термин «Носимая робототехника» стал популярным в 1960-х. Тогда акцент был на создании систем для увеличения нагрузки в процессе реабилитации пациентов. Практической целью разработки активных экзоскелетных устройств для конечностей человека является перераспределение трудоемких видов деятельности от человека к экзоскелету», — поясняет ученый.
Роботизированный привод создан с применением каркасных пневмодвигателей и пропорционального электромеханического управления.
Запатентоновое изобретение
По словам заведующего кафедрой, одна из самых главных в робототехническом протезировании проблем – это недостаточный уровень детализации вопросов, посвященных математическому моделированию и экспериментальным исследованиям рабочих процессов в экзоскелетных устройствах. Поэтому-то и отсутствуют инженерные методы расчета механической приводной части экзоскелетов.
«В процессе работы нами изучались динамические процессы, происходящие в двигателе экзоскелетного устройства при разработке эталонной процедуры, которая рассчитывается в процессе обработки сигнала электрической активности изготовленного электромеханического датчика силы», — пояснил ученый.
Как работает робот-привод
Андрей Изюмов объяснил корреспонденту «Деловой газеты.Юг» принцип работы нового устройства. Один полный шаг начинается с момента касания поверхности пяткой одной ноги и продолжается до следующего касания той же ноги, когда начинается движение другой ноги. Средняя продолжительность одного полного шага при нормальном темпе движения колеблется от 0,98 до 1,07 секунды.
Цикл ходьбы состоит из фазы опоры и фазы переноса. Фаза опоры, занимающая примерно 62% цикла ходьбы, начинается с приземления пятки одной ноги и заканчивается отрывом носка той же ноги. В этот период стопа несет вес тела. Средняя продолжительность фазы опоры составляет примерно от 0,59 до 0,67 секунды. Оставшиеся 38% цикла ходьбы приходятся на фазу переноса, когда стопа не несет веса и происходит переход от одного шага к другому, — от 0,38 до 0,42 секунды.
«Процесс функционирования роботизированной системы начинается с анализа сигнала датчика ускорения, который соответствует началу движения. Когда стопа поднимается, силовое взаимодействие с поверхностью уменьшается, что фиксируется с помощью силомоментного датчика. В этот момент времени запускается двигатель, и гайка начинает перемещаться, растягивая пружину 3. При отрыве стопы пружина помогает стопе подняться вверх. Положение пружины 3 контролируется датчиком положения», — поясняет ученый.
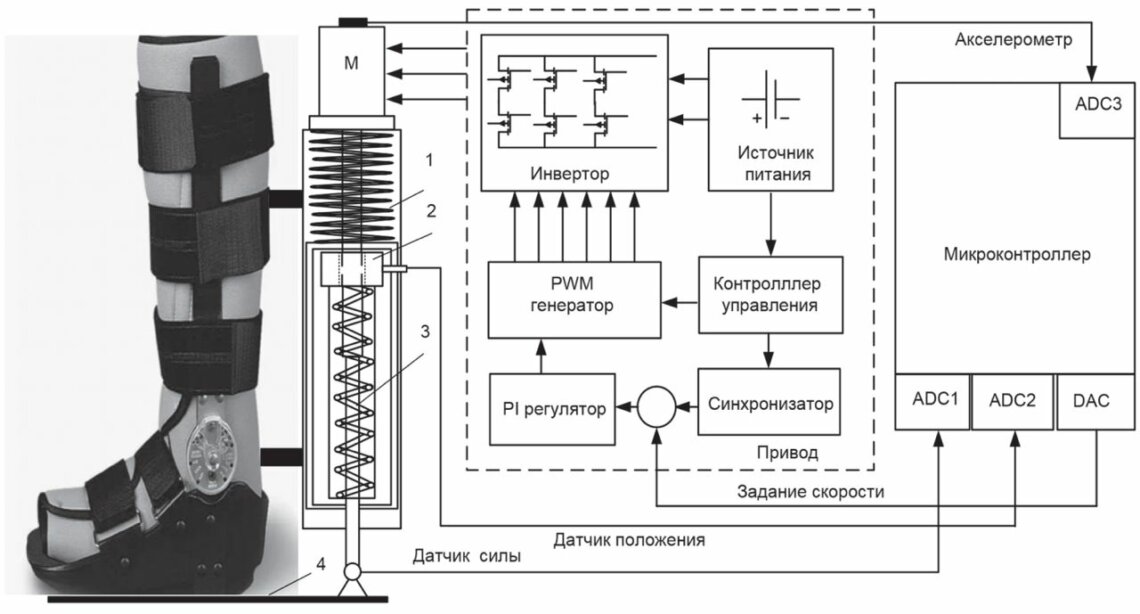
Одновременно с растяжением пружины 3 происходит сжатие пружины 1. Когда достигается заданная величина перемещения, пружина 3 освобождается, и стопа, сопровождаемая разжимающейся пружиной 1, начинает опускаться. Касание стопы с поверхностью снова фиксируется силомоментным датчиком. Завершение движения регистрируется датчиком положения при возвращении гайки в исходное положение.
Алгоритмы управления движением электромеханического привода экзоскелета, использующие информацию о физиологических возможностях оператора, расширяют функциональные возможности активного экзоскелета, позволяя осуществлять динамическую настройку параметров системы управления в зависимости от режима работы, повышая при этом эффективность управления экзоскелетом.
На данный момент у изобретения ученых – два патента, оба относятся к исследованиям, направленным на повышение качества проектирования. Кроме того, результаты диссертационной работы иракского аспиранта и разработанные им методы моделирования и проведения исследований электромеханического привода экзоскелета внедрили в иракском университете Аль-Нахрейн на кафедре «Мехатроники и робототехники».
Изобретение донских ученых успешно прошло испытания, в результате которых был реабилитирован пациент с повреждением голеностопного сустава. В производство роботизированный модуль планируется запустить в конце 2024 года.
Анастасия Талызина