Робототехника на Дону давно перестала быть сугубо университетской наукой — сегодня это живые проекты для реальных задач. Студенты и ученые ростовских вузов создают устройства, которые помогают людям восстанавливаться после травм, берут на себя тяжелую складскую работу, ориентируются по жестам оператора, отбирают пробы почвы для агрохолдингов и даже строят крылья для российского самолета.
«Деловая газета.Юг» в рамках специального проекта «Начный стартап» рассказывает о шести таких разработках — от «умной» перчатки до робота-укладчика композитных материалов.
Производственный робот, понимающий жесты
В Донском государственном техническом университете (ДГТУ) разработали программное обеспечение, которое позволяет управлять роботом жестами. Теперь не нужно надевать специальные перчатки или нажимать кнопки пульта — техника понимает движения рук человека как команды. Эту разработку университет сделал вместе с инженерами из МГТУ «Станкин» на деньги гранта Российского научного фонда.

Современные роботы все чаще работают бок о бок с людьми на заводах — их называют коллаборативными роботами. Чтобы человек случайно не попал под горячую руку манипулятора, робот должен «видеть» оператора и понимать, что тот делает. Раньше для этого использовали дорогие импортные системы.
Разработка использует два глаза: обычную камеру и специальный датчик глубины для анализа того, как далеко находится объект. Вместе они работают даже при плохом освещении и практически не ошибаются. Система обучена с помощью нейросети распознавать 10 жестовых команд.
«Дескриптор действий человека содержит информацию о взаимном расположении ключевых точек скелета человека в пространстве и времени. Алгоритм изображений видимого спектра и карт глубины строится на Основе параметризованной модели логарифмической изображений. Это повышает надежность и устойчивость распознавания», – рассказывает руководитель проекта Марина Жданова.
Программа уже готова к внедрению. Новинка будет полезна не только заводам и корпорациям, но и лабораториям, исследовательским центрам, больницам, электростанциям и даже агропредприятиям, где используют дроны и беспилотную технику.
Складской рабочий, который не спит и не ошибается
Выпускник ДГТУ Вячеслав Колесников создает систему, которая может решить проблему складов — нехватку людей и тяжелые условия труда. Проект называется «Роборохля» (созвучно с ручной тележкой-рохлей для перевозки паллет). Сейчас разработка перешла к этапу цифровых испытаний: вместо того чтобы сразу собирать железного робота, ученые сначала «гоняют» его в виртуальном мире.

Это не просто один робот-тележка, а целая экосистема для автоматизации склада. Центральное место в системе занимает так называемый цифровой двойник — точная 3D-модель реального склада со стеллажами, проходами и препятствиями.
«Идея проекта возникла из практического опыта работы в сфере промышленной автоматизации. Я регулярно сталкивался с задачами автоматизации складских процессов, а параллельно обучался на кафедре робототехники ДГТУ. В этот период от компании «ВкусВилл» поступил запрос на проработку концепции робота, способного автоматически перевозить грузы внутри склада по принципу рохли. Работая на реальной инфраструктуре, мне стала понятнее складская логистика, что позволило оценить масштаб задачи и перспективность направления», — говорит автор проекта Вячеслав Колесников.
Система подойдет розничным сетям, крупным складским комплексам, промышленным предприятиям и логистическим компаниям. Следующий шаг — создание физического прототипа железного робота-рохли, на котором проверят всю виртуальную начинку в реальных условиях. На этот этап команда сейчас ищет деньги на изготовление «железа». Параллельно цифровые испытания будут продолжаться.
Проект развивается при поддержке Фонда содействия инновациям и в рамках программы «Приоритет 2030» национального проекта «Молодежь и дети».
Роботехника для реабилитации пациентов
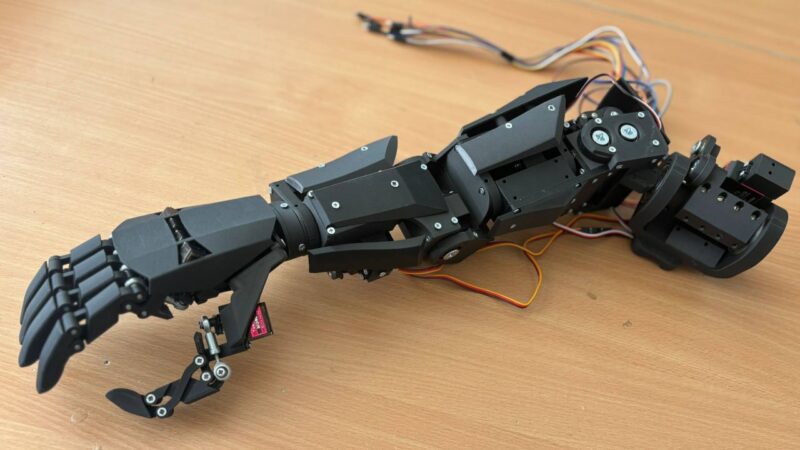
Студент ДГТУ создает устройство, которое может вернуть подвижность рук людям после тяжелых травм, инсультов и боевых ранений. Проект называется «Разработка бионического прибора для реабилитации верхних конечностей с нейроинтерфейсом». По сути, это «умная» перчатка, которая не просто заставляет пальцы шевелиться, а учит мозг заново управлять рукой.
Перчатка считывает электрические сигналы с мышц предплечья — те самые микро-импульсы, которые мозг посылает, когда человек хочет пошевелить рукой. Затем пневматические приводы мягко помогают пальцамвыполнить задуманное движение. Именно активное участие пациента, а не пассивное вытягивание, позволяет реально восстановить утраченные функции.
Автор проекта — Артем Рыльцев, магистрант передовой инженерной школы Института перспективного машиностроения ДГТУ. В 2025 году он выиграл всероссийский конкурс «Студенческий стартап» от Фонда содействия инновациям и получил на разработку грант в размере 1 миллиона рублей.
Идея родилась не на пустом месте. Сегодня на рынке есть похожие стационарные комплексы, но они импортные, дорогие и сложные в использовании. Артем ставит цель сделать российский аналог — доступный, компактный и современный. А в перспективе он хочет добавить в перчатку настоящий нейроинтерфейс, чтобы считывать сигналы не только с мышц, но и напрямую из мозга. Это может помочь пациентамс самыми тяжелыми нарушениями.
«Я создал рабочий прототип перчатки, считывающий мышечную активность человека, продолжаю дорабатывать электромиографический (ЭМГ) датчик, веду работу над внедрением нейроинтерфейса. Сам проект очень сложный, но я успешно решаю все проблемы, возникающие в процессе работы. Моя разработка привлекла внимание Министерства здравоохранения Российской Федерации, поэтому я прикладываю все усилия для проведения тестирования устройства и прохождения необходимой сертификации медицинского прибора», — делится магистрант Артем Рыльцев.
Уже сейчас есть рабочий прототип перчатки. В ближайших планах — участие в новом конкурсе «Старт» от Фонда содействия инновациям, чтобы получить финансирование и довести разработку до готового медицинского изделия. Следом — клинические тесты и сертификация. Если все пойдет по плану, то совсем скоро умная перчатка, рожденная в студенческой лаборатории, поможет тысячам людейвернуться к полноценной жизни.
Робот, который чувствует прикосновения
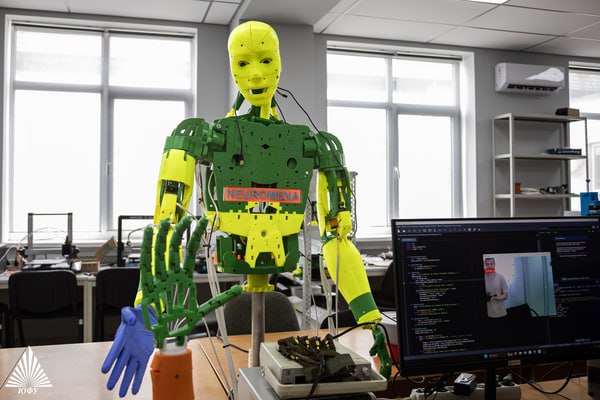
В Южном федеральном университете (ЮФУ) разработали технологии для биоморфного робота с «очувствленными» конечностями — то есть такого, который сможет чувствовать прикосновения, температуру и текстуру поверхности, как человек. Эта разработка в перспективе превратится в робота-помощника для спасательных операций, а также может быть использована в протезировании рук.
Над проектом в таганрогском кампусе ЮФУ работает лаборатория «Нейроэлектроники и мемристивных наноматериалов». Ученые этого подразделения уже больше десяти лет занимаются мемристорами — особыми микроэлектронными компонентами, которые могут запоминать, сколько через них прошло электричества, и на основе этого обучаться, подобно синапсам в мозге. С их помощью можно создавать нейроморфные структуры — микросхемы, которые аппаратно, то есть на физическом уровне, реализуют работу нейросетей. Именно эти чипы позволяют распознавать, трогает ли рука горячее или холодное, твердое или мягкое, гладкое или шершавое.
Первый вариант робототехнического комплекса выглядит как «робот-рука», работающая в режиме тени. Человек надевает перчатку с датчиками, начинает шевелить пальцами — а роботизированная рука повторяет движения и параллельно обучается. Студент четвертого курса Максим Картель пояснил, что главная задача команды — сделать систему миниатюрной, легкой и энергоэффективной, при этом сохранив человекоподобие по форме. В планах в течение года добавить к рукам и другие части тела робота, уточнил студент направления «Электроника и наноэлектроника» Константин Козюменко.
Сам проект, по словам руководителя лаборатории, по духу студенческий: ребята сами моделировали и печатали макет на 3D-принтере, делая упор не на тяжелую механику, а на микроэлектронную начинку. Проект поддерживается мегагрантом и реализуется под руководством ведущих мировых специалистов: профессора из Южной Кореи Пак Бэ Хо (одного из основателей мировых исследований мемристоров с 2000 года) и профессора ННГУ им. Лобачевского Виктора Казанцева, эксперта по нелинейной динамике и нейробиологии.
Робот-почвовед
В филиале Южного федерального университета в Геленджике успешно прошли лабораторные испытания роботизированной установки для отбора образцов почв. Разработка уже получила патент на полезную модель и заинтересовала крупные агрохолдинги — теперь у аграриев появится инструмент, который делает профессиональный анализ грунта быстрее, дешевле и точнее, чем при ручном труде.

Сама установка — это подвижная платформа, которая умеет плавно менять скорость, легко маневрировать даже в тесных условиях и уверенно передвигаться по пересеченной местности. Она сама бурит грунт любой плотности, автоматически извлекает образцы и через встроенную систему видеомониторинга в реальном времени показывает оператору все, что происходит.
«Наша установка — это реальное решение для агрохимии. Она сочетает в себе то, чего раньше не было в полевом мониторинге: полную автономность, точность и при этом — доступную стоимость. Фактически, мы создали инструмент, который делает профессиональный анализ грунта не просто быстрее, но и экономически выгоднее для сельского хозяйства», – отметила доктор биологических наук, профессор кафедры почвоведения и оценки земельных ресурсов АБиБ ЮФУ Светлана Сушкова.
Сама установка, по словам разработчиков, — не просто узкоспециализированный бур. «Робот-пробоотборник потенциально способен и на многое другое. Он может нести на себе измерительное оборудование, различные датчики, на него можно установить сложную систему автономной навигации. Система видеотелеметрии, установленная на него сейчас, позволяет получать данные для обучения нейронных сетей.
Сейчас разработка находится на 6-м уровне технологической готовности — это значит, что модель уже протестировали в условиях, близких к реальным, но не в чистом поле. Команда работает над повышением уровня до 8-го, а в перспективе — до 9-го, когда установка пройдет промышленную апробацию.
Робот-укладчик для крыла российского лайнера
Новочеркасский политех (Южно-Российский государственный политехнический университет имени М.И. Платова) разрабатывает роботизированные системы для производства композитного крыла российского среднемагистрального самолета МС-21. Речь идет об автоматической выкладке сухой углеродной ленты — ключевой технологии, которая раньше обеспечивалась импортным оборудованием, а теперь создается силами университетских инженеров.

В сотрудничестве с авиастроительным ПАО «Яковлев» и АО «АэроКомпозит», университет разрабатывает систему автоматической выкладки сухой углеродной ленты, которая используется для создания преформ обшивок панелей крыла, лонжеронов и панелей центроплана самолета. Центральный элемент разработки — автоматическая выкладочная голова, которая не только укладывает ленту, но и склеивает слои между собой с помощью лазерной сварки. В дополнение к «железу» инженеры создали собственное программное обеспечение, математические алгоритмы и удобный интерфейс для оператора.
Сейчас первый прототип выкладочной головы уже проходит опытно-промышленную эксплуатацию в московской лаборатории «АэроКомпозита», а второй — на заводе в Ульяновске. Разработанный политехниками робот-укладчик умеет выкладывать углеродную ленту под разными углами, что критически важно для прочности готовой детали крыла. На базе этих решений в перспективе планируется запустить производство полномасштабных выкладочных порталов и роботов.
София Купченко
Информационный обзор редакции
12+