
Все мы привыкли к тому, что «беспилотники» – это, прежде всего, беспилотные летательные аппараты. Однако наука не стоит на месте, и инженеры беспилотных систем предлагают решения для выполнения функций на только в воздухе, но и по земле, на воде и даже под водой. При этом разработчики наделяют свои «детища» разными умениями – какие-то беспилотники доставляют грузы, какие-то – изучают аквакультуру под водой, а какие-то – охраняют территорию.
Редакция «Деловой газеты.Юг» в рамках нового специального проекта «Научный стартап» разбиралась в профессиях современных беспилотников, разрабатываемых студентами ростовских вузов.
Воздушный доставщик грузов «с руками»
Одним из таких решений, над которыми сегодня работают студенты кафедры «Робототехника и мехатроника» Донского государственного технического университета (ДГТУ), является разработка захватного устройства и универсального контейнера для груза с целью автоматизации малогабаритных грузоперевозок при помощи дронов. Авторы идеи — команда инженеров-магистрантов, состоящих в студенческом научном кружке «Робототехник».

«Система доставки грузов дронами представляет собой решение для логистики и транспортировки товаров, средств первой и гуманитарной помощи. Она позволит улучшить процесс доставки, особенно в отдаленных или труднодоступных районах. При интеграции на беспилотные воздушные системы новое устройство поможет автоматизировать процесс доставки малогабаритных грузов, сведя ручной труд к минимуму и исключив «человеческий фактор»», — считают разработчики.
По мнению авторов проекта, недостатками беспилотных воздушных систем (БВС) сегодня являются:
- длительное время полета: чем выше вес дрона с грузом, тем больше времени потребуется на его доставку;
- жесткие требования к источнику энергии: чем дольше дрон пробудет в воздухе, тем большей емкости ему потребуется аккумулятор;
- «парусность»: габариты оснастки могут изменить способность БВС к полету.
Главным этапом доставки, требующим присутствие людей, является погрузка и выгрузка грузов с дрона. И здесь самым простым решением является грамотный подбор конструкции захвата и контейнера. Поэтому студенты также разрабатывают универсальный контейнер, который можно захватить из любого положения. Конструкция позволит уменьшить вероятность потери или брака в процессе доставки.


Захватное устройство и контейнер. Фото: Андрей Изюмов.
Преимуществом нового воздушного доставщика перед зарубежными аналогами станет более низкая стоимость разработки, добиться которой получилось за счет проектирования под серийные технологии: 3D-печать элементов, лазерная резка/фрезеровка и отечественная элементная база. Себестоимость захватного устройства — 60 тыс. рублей, предполагаемая цена для конечного потребителя – 90 тыс. рублей.
«Цель разработки — сделать продукт доступным для массового рынка операторов БВС, а не только для крупных предприятий, — объясняют разработчики. — Поэтому конструкция изначально проектируется под нижний диапазон цен. Вопрос о приобретении прав на разработку будет обсуждаться после завершения этапа испытаний и демонстрации стабильных результатов».
Проект уже прошел экспертную оценку Фонда содействия инновациям, по результатам которой получил финансовую поддержку в размере 1 млн. рублей в рамках программы «Студенческий стартап». Участниками проекта были проведены первые этапы научно-исследовательских и опытно-конструкторских работ. Проект находится на стадии опытного образца.
«Самый реалистичный сценарий для этого проекта — малосерийное производство после завершения испытаний и пилотных внедрений у первых заказчиков. В планах — создание версии захвата для более широкого диапазона форм грузов, а также интеграция новых интеллектуальных функций», — поделились авторы решения.
«Бег-бот» — тренер на беговой дорожке
«Бег-бот» – это мобильный робот для подготовки спортсменов-легкоатлетов. Существующие сегодня на рынке роботизированные решения не очень адаптированы для нужд спорта, считают сами разработчики. Они либо недостаточно мобильны, либо не адаптированы для решения задач бегунов. Студенческая разработка как раз предназначена для спортивных организаций, которые готовят профессиональных спортсменов-легкоатлетов. Робот может развивать скорость до 30 км/ч и работать на одном заряде до двух часов без остановок.
На проектом работают магистрант второго курса кафедры «Робототехника и мехатроника» Иван Манохин и руководитель проекта заведующий кафедрой «Робототехника и мехатроника», к.т.н., доцент Андрей Изюмов. Сейчас разработка находится на стадии прототипа.

«Спортсмен начинает тренировку, мобильный робот располагается на беговой дорожке стадиона. Тренер через мобильное приложение выбирает тип тренировки (разминка, спринт, марафон). От типа тренировки завысит скорость робота. Робот при помощи датчиков цвета начинает движение по разделительной полосе, которая нанесена на дорожке», — описывают принцип действия робота разработчики.
В планах авторов проекта — обучить нейросеть при помощи видеокамеры распознавать препятствия впереди робота. Примерная стоимость роботизированного «тренера» составляет 150 тыс. рублей. Команда проекта уже получила от проекта «Студенческий стартап» Фонда содействия инновациям грант в размере 1 млн. рублей.

Зарубежным аналогом отечественного решения является робот BeatBot компании Puma, представленного еще в 2016 году. Однако проект так и не был запущен в производство.
«Робологист» — помощник на складе
В рамках проекта «Робологист» инженеры и программисты ДГТУ создают сотрудника склада — складского логистического робота, способного автономно перемещаться по заданным маршрутам и выполнять задачи по транспортировке грузов. Студентами была разработана конструкция, подобраны необходимые компоненты, произведены программирование и тестирование различных систем. Основное внимание было уделено созданию навигационной системы, обеспечивающей точное перемещение робота по складу.

Надежный работник склада. Фото: Андрей Изюмов
«Технология адаптирована для использования внутри помещений, где сигналы GPS могут быть нестабильными или недоступными. Среди преимуществ такой системы — способность точно определять местоположение робота, адаптированность к изменениям в расположении стеллажей или товаров на складе, а также автономность работы. Использование Wi-Fi для картографирования повышает точность передвижения», — объясняют авторы проекта.
Грузоподьемность такого мобильного робота составляет 180 кг, а время автономной работы — более шести часов при максимальной загрузке. Разработка обходит зарубежные аналоги по своей грузоподьемности и времени работы. Сейчас проект также находится в стадии прототипа. Разработчиками уже были проведены первые тесты системы. В скором времени будет готовиться запуск устройства в промышленное производство.
Подводный комплекс
В Южном федеральном университете (ЮФУ) также активно ведут разработку беспилотных систем. Одними из таких проектов являются беспилотники студентов магистратуры Института компьютерных технологий и информационной безопасности ЮФУ Владимира Семенова и Петра Ледерера.
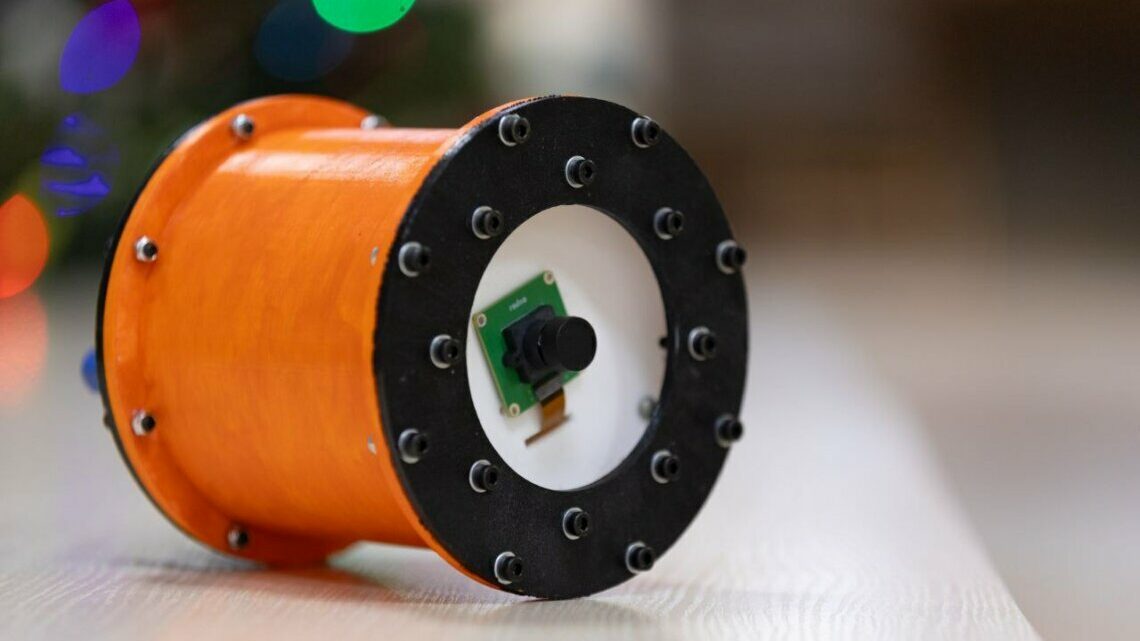
Первый из проектов — подводный комплекс с компьютерным зрением, самостоятельно анализирующий обстановку под водой и предназначенный для мониторинга аквакультуры, проверки состояния подводных сооружений и проведения исследований на шельфе.
«Принцип работы подводного комплекса основан на анализе видеопотока в реальном времени: система сама распознает объекты и строит их объемные модели без участия оператора. Подводный комплекс прошел испытания в виртуальных средах, где система показала стабильную работу по распознаванию и моделированию», — рассказывает Владимир Семенов.
Охранник территорий
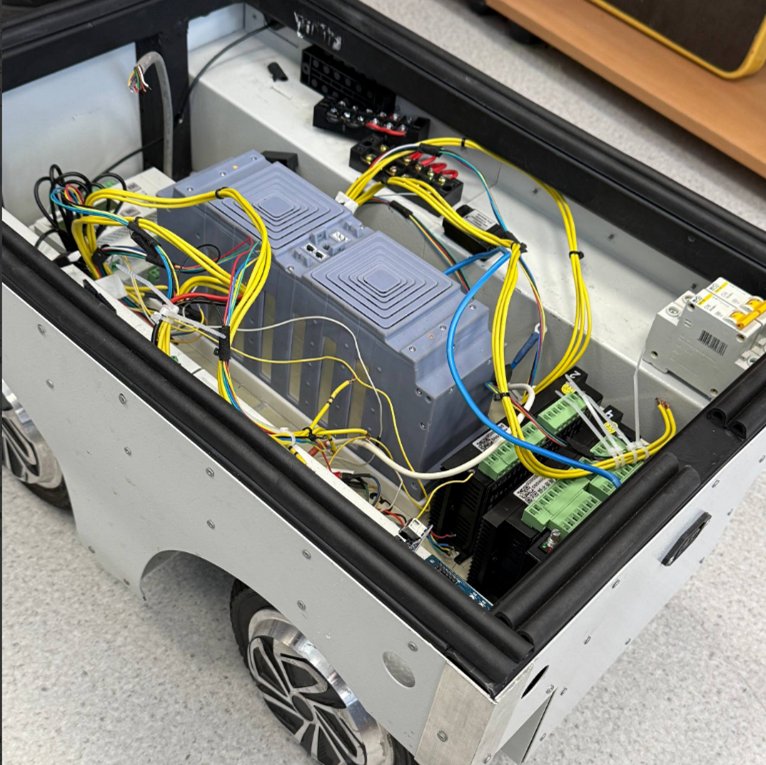
Второе решение студентов ЮФУ — наземный патрульный робот, предназначенный для охраны территорий предприятий, сельхозугодий и промышленных объектов.
«Наземный робот ориентируется на местности с помощью камер и датчиков, распознает препятствия и подозрительные объекты, самостоятельно прокладывает маршрут патрулирования. Наземный робот тестировался в условиях, максимально приближенных к реальной эксплуатации: отработаны движение по пересеченной местности и работа систем распознавания при различном освещении», — описывает механизм автор проекта.


Фото: Владимир Семенов.
«Сейчас оба проекта находятся на стадии лабораторных и натурных испытаний. Подводный комплекс завершит виртуальные испытания в ближайший год, после чего будет готов к созданию первых образцов, для тестирования в акватории Азовского моря и реки Дон. Наземный робот проходит финальные испытания на реальных объектах, параллельно ведем переговоры с потенциальными партнерами», — поделился текущими статусами своих проектов Владимир Семенов.
В планах ребят — расширить возможности обоих роботизированных комплексов. Для подводной системы студенты прописывают алгоритмы контроля состояния трубопроводов и инженерных сооружений, а для наземного робота проводятся исследования тандемной работы с БПЛА — для увеличения охвата размеров патрулируемой территории.
Анастасия Талызина
Информационный обзор редакции